
Acquiring hydrography data

CHS Hydrographer working on the ice
The Canadian Hydrographic Service (CHS) conducts hydrographic surveys to acquire data. We use this data to:
- create nautical charts or update existing charts
- develop tide and current tables and other navigational publications
Hydrographic surveys collect 3 types of data:
- depths and heights
- water levels and vertical datums
- positioning and orientation
Field personnel, such as surveyors and technicians, carry out data acquisition. To do this, they use:
- satellites
- survey platforms that include:
- aircraft
- land vehicles
- surface vessels
- autonomous or semi-autonomous underwater vehicles
-
Depths and heights
Depths and heights
Measuring the depths of all navigable waters of Canada is a main task for the CHS.
We measure the depth of water from a known location, such as a boat. We also measure the heights of surrounding land formations, such as:
- rocks
- islands or shorelines
- clearances under bridges and overhead cables
We also measure the heights, or elevation, of:
- rocks
- islands
- the space under:
- bridges
- overhead cables
- easily seen objects
- tops of peaks near the coast
Measurement tools
The CHS uses the Canadian Coast Guard ship Petrel to measure depths and heights. The vessel has a:
- MVP-30 profiling winch
- hull-mounted Kongsberg EM3002 multibeam echosounder
We use Petrel for shipboard surveys:
- on the Great Lakes
- in the eastern and western Arctic
We calculate height and depth by:
- inferring from satellite altimetry
- measuring with remote sensors, such as:
- echosounders (sonars)
- lasers (bathymetric lidars)
- correcting the data acquired for:
- tides
- vessel dynamics
- ocean conditions
- detecting objects on the seabed by scanning sonars, such as the sidescan sonar
The heights of surrounding land formations can be measured with lasers, such as topographic lidar. We can examine the backscatter from sonars and lidars to learn about the makeup of the seabed.
Another task for the CHS is determining the type of seabed and its material properties. This can be done by:
- taking physical samples:
- with tallow on a leadline
- remotely with a subsurface grab sampler
- inference from the acoustic or light backscatter properties of the reflected depth measurement signal

The Canadian Coast Guard’s Petrel

The Ponar Grab Sampler is commonly used to obtain samples of the seabed in hydrographic surveys.

Leadline
1 - 2,000 soundings per survey
Single Beam
500,000 - 750,000 soundings per survey

Multi Beam,
4,000,000 - 100,000,000 soundings per survey
Leadlines
Until the Second World War, the leadline was the main method of measuring depths and determining the type of seabed. The leadline is a cord with a lead weight at one end and depth marks along its length. It was lowered vertically to the seabed, and the depth mark on the cord at the water’s surface was recorded.
To determine the type of seabed, tallow was pressed into the hollow end of the lead weight. When the leadline was dropped into the water, material that adhered to the tallow would provide a physical sample of the seabed.
Echosounders
An echosounder sends sound pulses through water to measure water depth. The water’s depth is calculated by recording the time between when we send out the sound and when its echo comes back. The echosounder was developed for military purposes, but by the mid-1930s, it was used widely for hydrography in Canada.
Early echosounders were quite crude and had low resolution (a large sonar footprint). They required constant attention to get moderate performance. Advances in digital circuitry and digital signal processing led to modern survey echosounders with:
- high precision
- high resolution
- good long-time frequency stability
Improvements in transducer materials and design led to narrow-shaped beams capable of resolving small targets on the seabed.
When the echosounders replaced the leadline, there was no longer regular sampling of the seabed type. Instead, CHS hydrographers have developed ways to use acoustic backscatter to determine the type of seabed.
Sidescan sonar
Because the single-beam echosounder is aimed vertically, it can’t capture information on depth or hazards in the spaces between sounding lines. Sidescan sonar grew out of the idea of tilting a broad-beam echosounder to one side to produce a time series of acoustic returns. This technology has narrow along-track beam width and high across-track resolution.
Sidescan sonars work well for identifying seabed obstacles between sounding lines. However, sidescan sonar measurements are taken under the assumption that the seabed is flat, which means they can’t:
- locate those targets precisely
- measure the least depth accurately
Fortunately, the single-beam echosounder and sidescan sonar work together.
Sweep system
Another approach used by CHS is the sweep system. This system deploys many single-beam echosounders equally spaced along a boom (or multiple booms) of a vessel.
The sweep system:
- provides total coverage of the seabed at some depths
- gets precise depth and position of each measured sounding
While the sweep system has a far larger coverage range than the single-beam echosounder, it’s limited by the:
- width of the ship’s booms
- impact of large booms restricting the movement of a ship

CHS uses the Canadian Coast Guard’s F.C.G. Smith, which has single-beam echosounders lined along its booms in a sweep system.
Swath system
The swath system is made up of sonars that can obtain multiple across-track soundings from the same array of transducers. This is usually a transmitter array and at least one receiver array.
A swath system doesn’t have the physical constraints of a sweep system. And its angular coverage of the seabed makes it far more efficient than a sweep system as the depth increases.
Multibeam echosounder
Multibeam echosounders are a class of swath system. Like single-beam echosounders, they transmit a shaped acoustic pulse into the water column. Unlike them:
- the transmit beam (or ping) is:
- wide in the across-track direction
- narrow in the along-track direction
- there’re many receive beams for each ping, and each is:
- wider in the along-track direction
- narrow in the across-track direction
The combination of these two beam patterns results in wide coverage across-track with very high spatial resolution. This system overcomes:
- the limitations of sweep systems
- all the shortcomings of combined single-beam echosounders and sidescan sonars
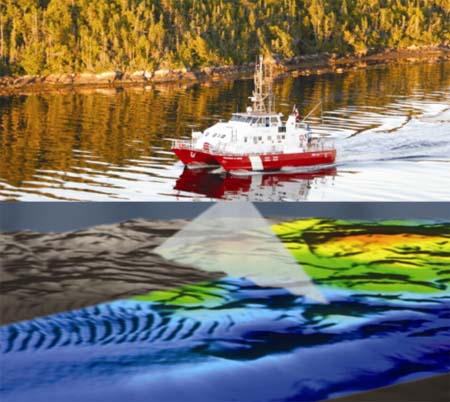
CHS uses the Canadian Coast Guard Ship Frederick G. Creed, which is equipped with a multibeam echosounder to collect high resolution 3-D imagery of the ocean floor.
Phase-measuring bathymetric sidescan sonar
Phase-measuring bathymetric sidescan sonar is also called phase-differencing sidescan sonar. It collects a time series of amplitudes from a side-looking array in the same way that a standard sidescan sonar does.
However, unlike a standard sidescan, the angle of the arriving signal can be determined from:
- multiple receiver arrays
- high-tech signal processing
Phase-measuring bathymetric sidescan sonars have the advantage of a very wide look angle. This is about 10 times water depth, versus about 4 times water depth for most multibeam echosounders.
These sonars also have very high-resolution acoustic backscatter imagery.
Their main flaw is the increased noise in the data compared with multibeam echosounders. It also has a gap directly below the sonar where no data are collected, like a regular sidescan sonar.
We use the phase-measuring bathymetric sidescan sonar mainly for habitat mapping in very shallow, nearshore water.
Acoustic backscatter
Single-beam echosounders, multibeam echosounders and sidescan sonars can measure:
- the strength of the returned (backscattered) signal
- round-trip time for a pulse of sound to reflect from the seabed
These are depicted by the darkness of an echosounder trace. Lighter traces indicate that more sound is being absorbed by the seabed.
Hydrographers have used this idea to associate:
- lower (lighter) acoustic backscatter returns with a softer seabed
- higher (darker) acoustic backscatter returns with a harder seabed
This has led to research in acoustic seabed classification where the type of seabed material is determined from the strength of the backscattered acoustic signal.
Typically, a classification based on acoustic backscatter needs to be tested by physically sampling the seabed. This is called grab sampling or ground-truthing.
Lasers
While echosounders are the most common way of measuring water depths today, lasers can be used:
- in shallow, clear water
- to locate shoreline structures
- to measure heights on land near the shore
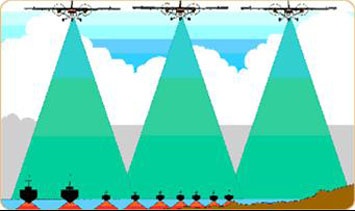
The coverage of a lidar flight line, compared to the coverage of the multibeam lines required to survey the same area.
The coverage of a lidar flight line, compared to the coverage of the multibeam lines required to survey the same area.
Bathymetric lidar
Lidar stands for light detection and ranging. It uses the time of flight of a laser pulse to determine distance. This requires very precise timing to measure distance accurately since light travels at roughly 3 billion metres per second.
Airborne bathymetric lidar deploys lasers from an aircraft, such as a fixed-wing or helicopter. These lasers are:
- a red laser that measures the height of the sea surface since it doesn’t penetrate the water
- the blue-green laser that:
- easily penetrates clear water
- measures the distance to the seabed, if enough backscatter energy returns to the aircraft
The time difference between the two laser returns gives the depth of water after some signal processing.
Bathymetric lidar works in depths up to about 50 metres, when the water is clear and the seabed is light-coloured, such as around coral reefs. It isn’t suitable for measuring depth if:
- the water is cloudy
- there are suspended materials in the water column, such as:
- fish
- kelp
- air bubbles
Topographic lidar
Topographic lidar can measure elevations on land using the travel time of a red laser pulse. Airborne lidar mapping uses near-vertical laser pulses to develop a digital elevation model of the terrain.
Topographic lidar also uses backscattered energy to determine distance, which means multiple travel times are possible for each beam in areas with tree cover.
Many lidar applications require ‘bare-earth’ digital elevation models to be developed. A task of lidar analysis involves identifying and removing the objects that sit on the ground, such as trees and buildings.
For CHS, topographic lidar is useful for delimiting the nearshore uplands and the foreshore. It can also be used to estimate the location of the high-water line.

Land test of Riegl VZ400 mobile lidar that would be mounted on the CHS multibeam launch Harlequin vessel during summer 2012.
Land test of Riegl VZ400 mobile lidar that would be mounted on the CHS multibeam launch Harlequin vessel during summer 2012.
Lidar reflectivity
Lidar backscatter provide information about the seabed or topography from the strength of the reflectance.
Measuring time of flight of a signal relies on some energy being backscattered from the object of interest.
This is true for echosounders requiring an acoustic backscattered signal from the seabed. It’s also true for backscattered light energy from any lidar system.
Scanning laser systems
Lidar systems don’t need to be aimed vertically to be useful for mapping.
Horizontally aimed scanning laser systems have been used for decades in all types of surveying applications, including monitoring:
- the stability of ship wrecks
- deformations of earthen dams
These systems can also be used from moving platforms, such as a truck or a launch.
In the launch application, a scanning laser pointed at the shoreline allows precise measurements of:
- all shoreline construction
- the natural shape of the:
- foreshore
- high water line
- nearshore topography
These systems can only map what they can see. Objects hidden by anything, like a moored ship, won’t be mapped until the ship leaves its berth.
Correcting for sound speed refraction in the water column
For vertically aimed sonar beams, changes in density throughout the water column don’t affect the path of the sound pulse. However, an indirectly aimed sound wave will bend when it encounters a change in water column density.
This is known as refraction. If left uncorrected, it can cause significant distortions in the apparent seabed obtained from multibeam echosounders and phase-differencing sidescan sonars, especially in the outermost beams.
To remove the effects of refraction, the water column density profile below the sounder must be determined. This is normally done by calculating sound speed by measuring:
- a vertical sound speed profile
- other parameters
Profiling winches
Measuring a sound speed profile (a cast) at the beginning of a multibeam echosounder survey provides the information the swath sonar needs to correct for refraction properly. However, this is only for the precise location and for a few moments after the cast was taken.
The density profile in the water column can change rapidly in both space and time in dynamic ocean regions, like:
- areas of upwelling
- near a large river delta
Swath sonar surveys in these areas need frequent and ongoing sound speed casts to correct the swath data for refraction.
It’s inefficient to stop a vessel each time a new cast is needed. The CHS helped to develop under-way profiling technology so a vessel can continue to operate while sound speed casts:
- continue to be taken
- are applied to the swath data as they’re being collected
-
Water levels and vertical datums
Water levels and vertical datums
To calculate the correct water depth, an established vertical datum is used against:
- other vertical reference points (datum)
- the tide level at the time of the depth measurement
Tide gauges are used to measure water levels.
Tide gauges
Local tide gauges are routinely installed during hydrographic surveys. These correct for local conditions against a vertical reference or datum.
The tidal records are used to develop tidal constituent sets. These can be used later for tidal predictions in these areas.
The CHS has the permanent water level network, which is a network of permanent tide gauges. Some tide gauges have been collecting tide data for over a century. Others, such as the new laser tide gauge systems, are more recent.
Sea-level monitoring
Because of the permanence of our network of gauges, long-term trends in average sea level can be observed over time.
We share monthly averages from our permanent gauges with:
- Ports Canada harbour masters
- other nations for scientific research
- other departments such as Environment and Climate Change Canada
- other sections within Fisheries and Oceans Canada, such as Oceanography
Tsunamis and storm surges
The CHS permanent water level network is used for emergency preparedness and emergency response.
On the Pacific coast, tsunamis are a real threat from seismic activity (earthquakes) in areas such as:
- Chile
- Japan
- Alaska
- the Cascadia subduction zone off the coast of Vancouver Island
On the Atlantic coast, many low-lying areas are prone to flooding from storm surges. Storm surges are rapid and sustained increases in the level of the tide caused by low pressure and strong onshore winds.
-
Positioning and orientation
Positioning and orientation

CHS electronic charts being used on a computer aboard a ship for navigation purposes.
A hydrographic survey must include, from the exact time of the water depth measurement, the precise location from either:
- the surface of the earth
- below the surface of the ocean
We use satellite positioning technologies to measure position and motion sensors to track vessel orientation at the time of the measurement.
When CHS measures water depths or elevations of surrounding landmasses, each measurement needs to have a precise location to be useful for navigation.
Hydrographers used to position depths and heights using optical methods, such as sextant angles or a surveyor’s transit. In the late 1950s, they began to use electronic positioning systems.
By 1980, the electronic positioning systems had evolved into more precise and reliable positioning methods and were used routinely on surveys of all kinds. In the late 1980s, CHS switched to satellite-based positioning systems. Today, all CHS surveys use:
- a variety of satellite-based positioning technologies
- different post-processing techniques to correct for any movement during depth measurement
Positioning technologies
The GPS satellite constellation is a satellite navigation system maintained by the U.S. government and available to anyone with a GPS receiver.
The two antennae on the CHS vessel, Shoal Seeker, are part of the differential GPS system.
GPS
The U.S.-based GPS is the most widely known satellite-based positioning system. Many people have their own GPS receiver in their car, boat or smart phone.
The CHS uses a highly technical GPS that positions CHS vessels, both horizontally and vertically, to within a few centimetres.
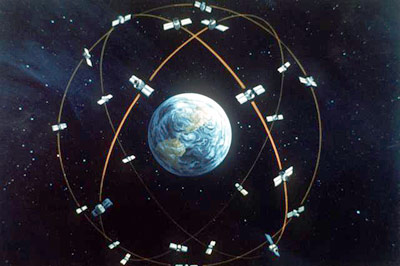
A graphic showing the GPS satellite constellation navigation system.

The two antennae on the CHS Shoal Seeker vessel.
Differential GPS
Differential GPS (DGPS) corrects basic errors in the satellite broadcast GPS signal.
In the marine environment, local-area DGPS corrections are broadcast from Canadian Coast Guard radio beacons in most regions of the country. This technology isn’t yet available in the Arctic.
Satellite-based augmentation system
DGPS corrections may also be available over a wide area, called wide-area DGPS. A system that gives these corrections around the globe is the satellite-based augmentation system. In North America, this system is called a wide-area augmentation system.
Glonass
Russia has developed Glonass, which is currently the only system close to the capabilities of the GPS. China, India and the European Union are all developing their own systems.
The CHS has been upgrading GPS receivers to be fully Glonass compliant. This gives us an additional constellation of 24 positioning satellites. Access to more satellites means greater positioning reliability, especially in remote areas, like the Arctic.
Global navigation satellite system
The global navigation satellite system is the combination of the:
- satellite-based augmentation system
- suite of satellite-based positioning systems
Real-time kinematic positioning
Real-time kinematic positioning makes information available when:
- we collect it (in real time)
- the vessel is in motion (kinematic)
We use real-time kinematic positioning when we need positioning within 10 centimetres, or even 1 to 2 centimetres, particularly in the vertical dimension.
This type of precision makes measurements on the GPS carrier phase signal. To get this precision in real time, measurements must also be:
- taken at a local shore-based GPS station (a reference station)
- transmitted by radio modem to the vessel as it’s collecting data
Post-processing techniques
Precise positions can be determined by post-processing. This involves refining the data after they’re collected. Advantages of computing positions after collection includes:
- not needing a radio modem
- applying filtering and smoothing to the data
- greater possible position precision from post-processed:
- satellite orbits
- clock correctors
Post-processed kinematic and precise point positioning
Post-processed kinematic is like real-time kinematic in that the algorithms applied to the raw data are essentially the same as would be applied in real time.
However, this can use more technical approaches, which usually result in more precise position in 3 dimensions.
Both kinematic techniques require at least 1 reference station within 100 kilometres of the survey vessel to obtain reliable results.
Another post-processing approach is called precise point positioning, which:
- doesn’t require reference station data
- can be applied to:
- kinematic observations, such as those of a survey launch
- static observations, such as those over a benchmark for 24 hours
- requires several hours for a solution to settle on the correct values, so it isn’t appropriate for kinematic use on lines of short duration
Real-time precise point positioning options also exist.
Inertial navigation system
The CHS uses high-end motion sensors that combine inertial navigation system and the global navigation satellite system in the same unit.
An inertial navigation system provides very smooth, very high data rate trajectory information. However, it suffers from drift over time. The global navigation satellite system, on the other hand, doesn’t drift.
Combining both systems provides very accurate trajectories. They’re:
- within a few centimetres in all 3 dimensions
- at the very high data rates needed to correct multibeam sonar motions in real time
The solution is often referred to as inertially-aided real-time kinematic positioning.
Inertially-aided real-time kinematic positioning
We can use post-processing to improve the real-time results obtained with inertially-aided real-time kinematic positioning.
The calculations of the movement of the vessel after the fact (the post-mission trajectory) can be improved with:
- the ability to smooth the data
- the use of multiple reference stations
- information on satellite orbits and clocks
The algorithms used, called a tightly coupled Kalman filter, can provide statistical estimates of the quality of each parameter. This includes the:
- roll
- pitch
- height
- latitude
- longitude
- heading uncertainties
-
Survey platforms
Survey platforms
Survey platforms used by the CHS include:
- aircraft
- satellites
- surface vessels
- underwater vehicles
We use motion sensors to refine the data we acquire.
Surface vessels
The most common survey platforms used by CHS are surface vessels, such as:
- ships
- boats
- launches
Most of these vessels are owned and operated by the Canadian Coast Guard, but the CHS owns some smaller vessels.
Underwater vehicles
Underwater vehicles are used in areas where surface vessels are:
- unsafe
- inefficient
- incapable of collecting good data
These vehicles may be semi-autonomous or may be completely autonomous.
The CHS uses:
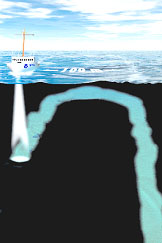
- autonomous underwater vehicles for under-ice work
- remotely operated vehicles from a ship through a tether
However, we still consider these vehicles developmental for routine data acquisition operations.
Aircraft
Aircraft, such as airplanes and helicopters, are used for:
- conducting rapid bathymetry (depth) or topography (height) surveys
- taking CHS personnel to remote locations to install or service equipment
Aircraft can cover large areas quickly and provide a safe alternative to small boats in rock-strewn waters exposed to ocean swells.
These technologies provide the best possible interpretation of the:
- shallow depths of the nearshore
- shape and nature of the foreshore
- high-water line and low-water line
- low elevation heights of the nearshore
This information is used to:
- update charts
- identify key nearshore habitats
- assist in planning for spill response
- model for tsunami and storm surge responses
Satellites
Satellites can also provide imagery or sea-surface height information that’s useful to the CHS.
A satellite’s ability to revisit the same area repeatedly makes it useful in verifying recent changes in areas of ongoing development. This is particularly true for the shoreline, such as harbours.
Many satellites provide imagery or height data with:
- high spatial resolution, such as:
- pixel size
- small ground footprint
- broad spectral resolution, which is made up of many frequency bands and allows for better:
- ability to see into clear water
- discrimination of foreshore type
- good temporal resolution which includes frequent revisits to check on construction status of proposed facilities
These characteristics can be useful for improving shoreline and offshore tidal modelling.
Satellites that don’t rely on visual data, those that use radar, are useful for imaging shoreline areas through cloud cover or at night.
This can be very useful for shoreline images at a particular stage of the tide.
Satellites used by the CHS include:
Inferring depths from satellite altimetry
The oceans cover about 71% of the earth’s surface. Mapping these oceans using echosounders will take centuries.
In the deep ocean, it’s possible to infer the depth of water by looking at the topography of the sea surface using satellite altimetry.
Motion sensors
Motion sensors measure all the motions of the sonar during transmission of each ping and receipt of each beam acquired from multibeam sonars.
Hydrographers use these measurements to further refine the depth data.
Motion sensors are used for measuring:
- roll
- pitch
- heave
- heading
Inertial sensors measure accelerations and are used to determine spatial displacements like:
- sway
- surge
- heave
Gyroscopes measure angular rotations as a source of heading with respect to true north. These sensors are arranged in triads that are orthogonal (at right angles) to each other in a 3D reference frame, such as x, y and z axes.

The CHS’ hydrographic launch, being deployed from a Canadian Coast Guard ship.
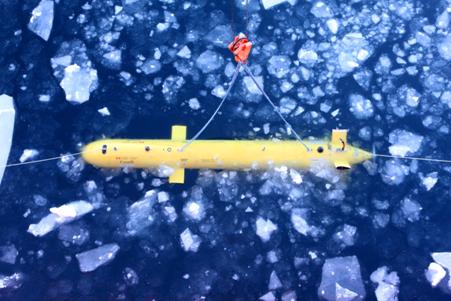
Deploying an autonomous vehicle from an icebreaker vessel or from an ice camp to collect hydrographic data in under-ice regions of the Arctic Ocean.

Conducting bathymetry surveys using aircraft with lidar equipment.

In a 3-D frame, the roll is on the x axis, the sway is on the y axis and the yaw is on the z axis.
- Date modified: